ZT
与拉式变换相似(乘一个指数衰减后求 FT)
先给结论
概念引入
定义:乘一个收敛因子后求离散时间下 FT,即
\[
\mathrm{DTFT}\langle x[n]r^{-n}\rangle=X(r\mathrm{e}^{\mathrm{i}\Omega})=\sum_{n=-\infty}^{+\infty}x[n]r^{-n}\mathrm{e}^{-\mathrm{j}n\Omega}=\sum_{n=-\infty}^{+\infty}x[n]\:(r\mathrm{e}^{\mathrm{j}\Omega})^{-n} , r>0
\]
为了方便,令\(z=r\mathrm{e}^{\mathrm{j}\Omega}\),于是有
\[
X(z)\:=\:\sum_{n=-\infty}^{+\infty}x[\:n\:]z^{-n}
\]
同样,也有 本征函数 和 传递函数
\[
H(z)=\sum_{k=-\infty}^{+\infty}h[k]z^{-k}
\]
于是有
\[
y[\:n\:]=H(\:z\:)\: z^{n}
\]
对于 逆变换 ,有
\[
x[n]r^{-n}=\mathrm{IDTFT}\langle X(r\mathrm{e}^{\mathrm{i}\Omega})\rangle=\frac{1}{2\pi}\int_{-\pi}^{\pi}X(r\mathrm{e}^{\mathrm{i}\Omega})\mathrm{e}^{\mathrm{i}\Omega n}\mathrm{d}\Omega
\]
稍加修改
\[
x[n]=\frac{1}{2\pi}\int_{-\pi}^{\pi}X(r\mathrm{e}^{\mathrm{j}\Omega})\:(r\mathrm{e}^{\mathrm{j}\Omega})^{n}\mathrm{d}\Omega
\]
换元后得线积分形式
\[
x[n]=\frac{1}{2\pi\mathrm{j}}\oint_{C}X\left(z\right)z^{n-1}\mathrm{d}z
\]
\[
符号\oint_c表示 z 平面内以原点为中心沿闭合围线 C 的逆时针方向的积分。\\ 上式信号x[n]表示成了复指数 z^n 的加权叠加,其权值为\frac1{2\pi\mathrm{i}}X(z)z^{-1}dz。
\]
同样的,存在 ROC【收敛域】,为复平面内的圆域
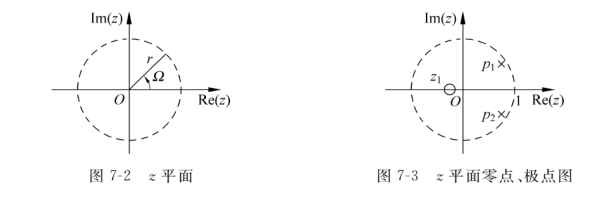
于是 可得\(Z\)平面和 零极点图
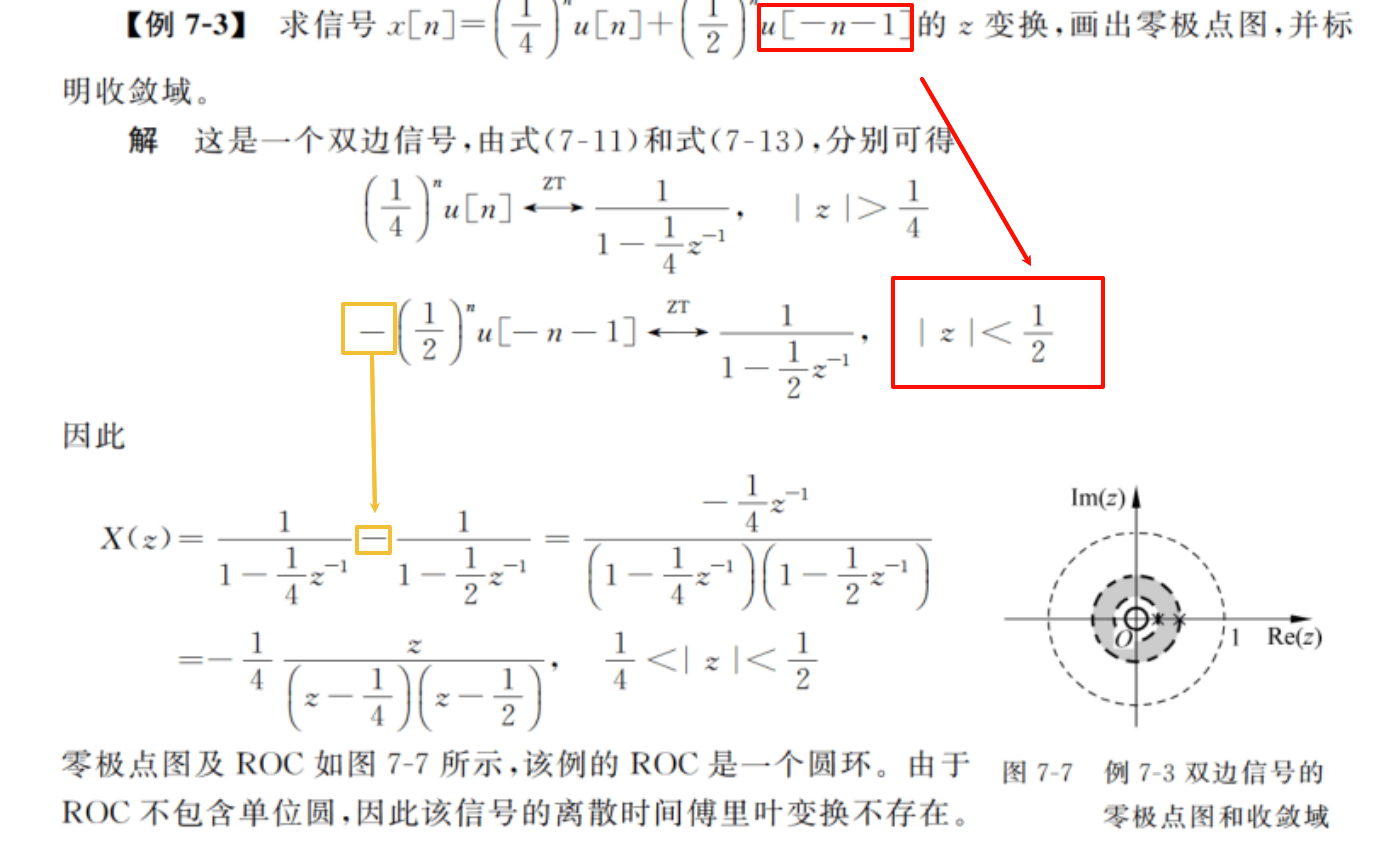
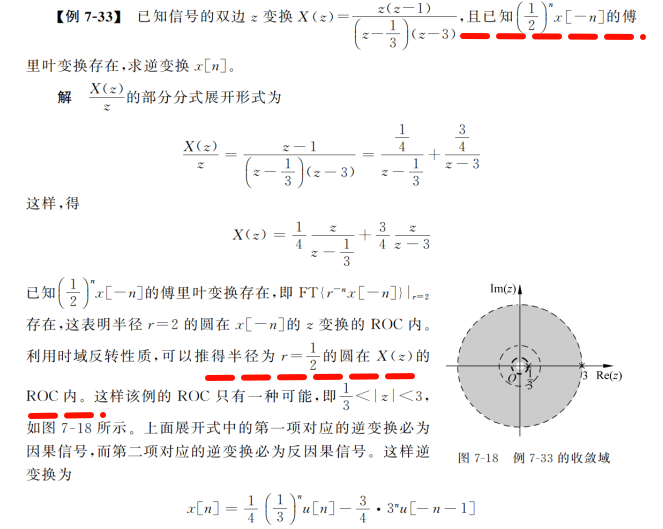
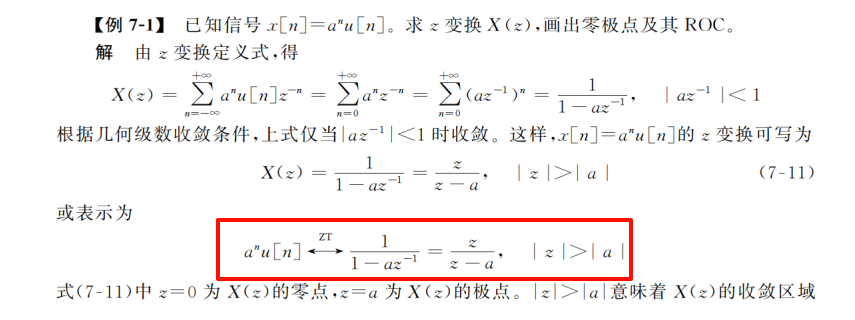
【例题】
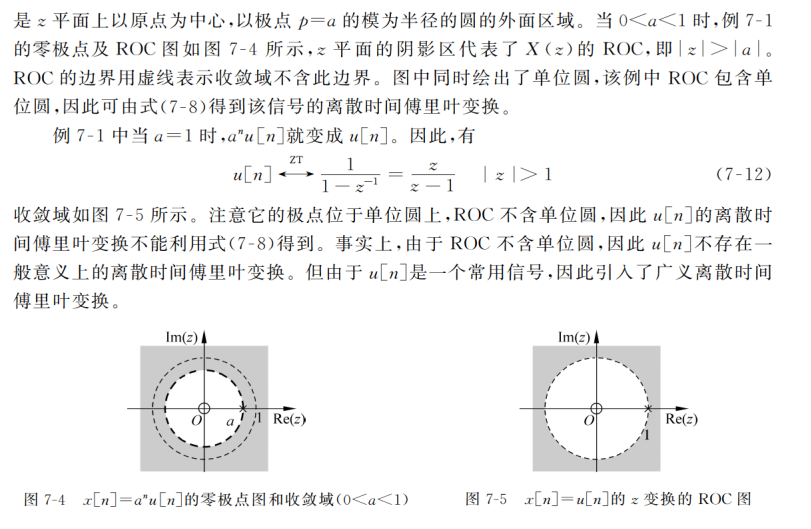
即因果系统 ROC 在圆外【拉式 ROC 在右侧】、稳定系统需要包含单位圆【拉式的虚轴】
小贴士
对于 Z 变换也有双边/单边之分,即逆变换形式由 ROC 变换而不唯一,比如下面的两个变换
-
\[
a^nu\begin{bmatrix}n\end{bmatrix}\overset{\mathrm{ZT}}{\longleftrightarrow}\frac{1}{1-az^{-1}}=\frac{z}{z-a}
\]
-
\[
-a^nu\begin{bmatrix}-n-1\end{bmatrix}\overset{\mathrm{ZT}}{\longleftrightarrow}\frac{1}{1-az^{-1}}=\frac{z}{z-a}
\]
二者的 Z 变换一致,但 ROC 不同
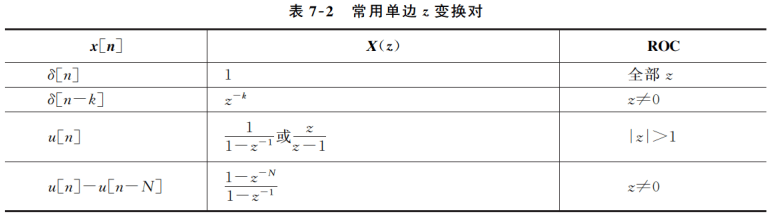
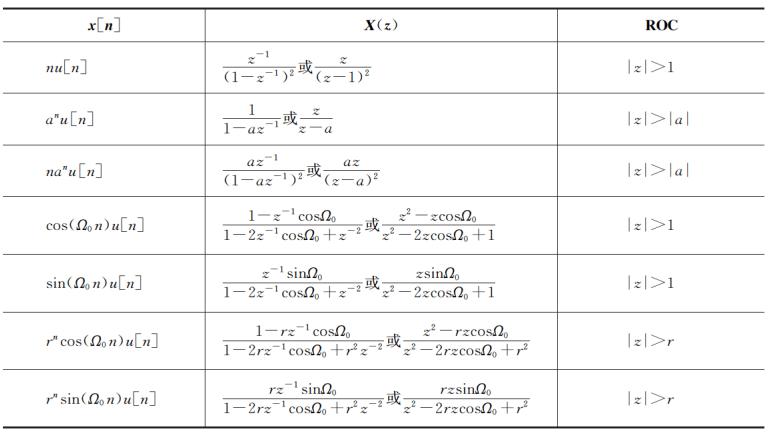
典型的单边 Z 变换
即对 因果 信号的分析
-
\[
a^nu\begin{bmatrix}n\end{bmatrix}\overset{\mathrm{ZT}}{\longleftrightarrow}\frac{1}{1-az^{-1}}=\frac{z}{z-a},|z|>|a|
\]
-
\[
\delta[n]\longleftrightarrow1\:,\quad\mathrm{ROC}\text{ 为全 }z\text{平面}
\]
-
\[
\cos(\Omega_{0}n)u[n]\overset{\mathrm{ZT}}{\operatorname*{\longleftrightarrow}}\frac{1-z^{-1}\cos\Omega_0}{1-2z^{-1}\cos\Omega_0+z^{-2}}=\frac{z(z-\cos\Omega_0)}{z^2-2z\mathrm{cos}\Omega_0+1},\quad\mid z\mid>1
\]
-
\[
\sin(\Omega_{0}n)u[n]\overset{\mathrm{ZT}}{\operatorname*{\longleftrightarrow}}\frac{z^{-1}\sin\Omega_0}{1-2z^{-1}\cos\Omega_0+z^{-2}}=\frac{z\sin\Omega_0}{z^2-2z\mathrm{cos}\Omega_0+1},\quad\mid z\mid>1
\]
三角比较难记,只能多用多练了
-
\[
u[n]-u[n-N] \overset{\mathrm{ZT}}{\operatorname*{\longleftrightarrow}}\frac{1-z^{-N}}{1-z^{-1}}
\]
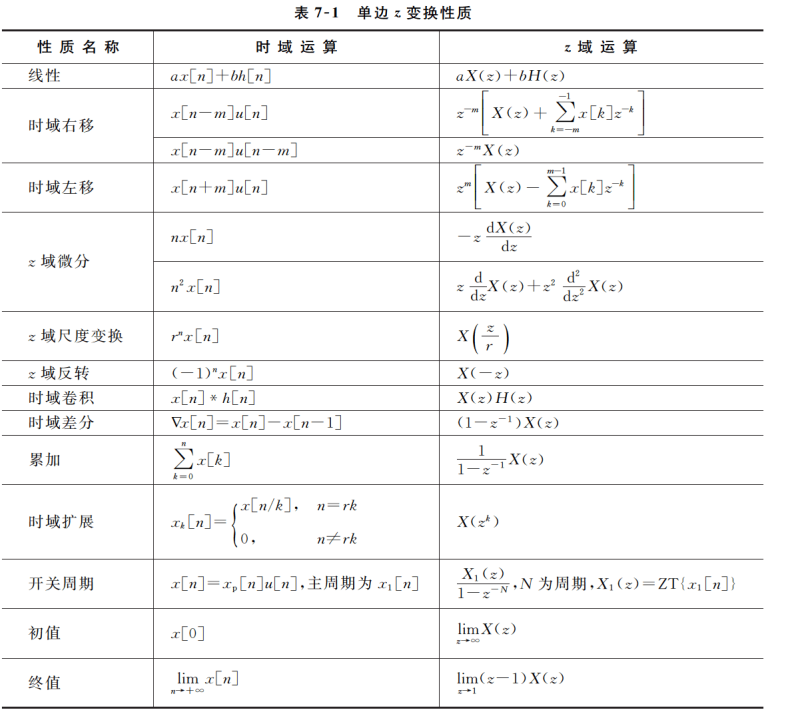
ZT 性质
基于朴素的想法观察离散信号
- 线性
注意 ROC 为 相交 的部分
\[
ZT\{ax[n]+bh[n]\}=aX(z)+bH(z)
\]
- 时移
向右移动,就是在 X(z)的基础上 加上 移动右边的 -m~-1 项,再给一个\(Z^{-m}\)
向左移动,就是在 X(z)的基础上 减掉 移到左边的 0~m-1 项,再给一个\(Z^{m}\)
\[x[n-m]u[n]\overset{\mathrm{ZT}}{\operatorname*{\longleftrightarrow}}z^{-m}\left[X(z)+\sum_{k=-m}^{-1}x[k]z^{-k}\right]\]
\[x[n+m]u[n]\overset{\mathrm{ZT}}{\operatorname*{\longleftrightarrow}}z^m\left[X(z)-\sum_{k=0}^{m-1}x[k]z^{-k}\right]\]
特别的,当信号为因果信号时
\[x[n-m]u[n]\stackrel{\mathrm{ZT}}{\longleftrightarrow}z^{-m}X(z)\]
\[x[n+m]u[n]\stackrel{\mathrm{ZT}}{\longleftrightarrow}z^m\left[X(z)-\sum_{k=0}^{m-1}x[k]z^{-k}\right]\]
土想想,因果信号左边就没东东,加了也是白加,比如 u[n]
另外,不管是双边/因果信号,始终有
\[
x[n-m]u[n-m]\overset{\mathrm{ZT}}{\longleftrightarrow}z^{-m}X(z)
\]
同时,能得到开关信号的解
\[
X(z)=\frac{X_1(z)}{1-z^{-N}}=\frac{z^N}{z^N-1}X_1(z)
\]
- Z 域微分
类比拉式变换,*t = 求导取反,不过多了一个*z
\[
nx\begin{bmatrix}n\end{bmatrix}\overset{\mathrm{zr}}{\longleftrightarrow}-z\:\frac{\mathrm{d}}{\mathrm{d}z}X\left(z\right)
\]
进一步推广
\[
n^mx\begin{bmatrix}n\end{bmatrix}\overset{\mathrm{ZT}}{\longleftrightarrow}\left(-z\:\frac{\mathrm{d}}{\mathrm{d}z}\right)^{(m)}X(z)
\]
\[
\text{符号}\bigg(-z\:\frac{\mathrm{d}}{\mathrm{d}z}\bigg)^{(m)}\text{表示}-z\:\frac{\mathrm{d}}{\mathrm{d}z}\bigg(-z\:\frac{\mathrm{d}}{\mathrm{d}z}\bigg(-z\:\frac{\mathrm{d}}{\mathrm{d}z}\cdots\bigg(-z\:\frac{\mathrm{d}}{\mathrm{d}z}X(z)\bigg)\bigg)\bigg)\bigg)\text{共求导 }m\text{ 次}
\]
- 尺度变换
\[
r^nx\begin{bmatrix}n\end{bmatrix}\overset{\mathrm{ZT}}{\longleftrightarrow}X\biggl(\frac{z}{r}\biggr),\quad r\neq0
\]
特殊的,有反转性质
\[
(-1)^nx\begin{bmatrix}n\end{bmatrix}\overset{\mathrm{ZT}}{\longleftrightarrow}X(-z)
\]
进一步,得到
\[
\begin{gathered}
r^{n}\cos(\Omega_{0}n)\:u[\:n\:]\longleftrightarrow\frac{1-rz^{-1}\cos\Omega_{0}}{1-2rz^{-1}\cos\Omega_{0}+r^{2}z^{-2}}=\frac{z^{2}-rz\cos\Omega_{0}}{z^{2}-2rz\cos\Omega_{0}+r^{2}} \\
r^{n}\sin\Omega_{0}nu\left[n\right]\overset{\mathrm{ZT}}{\longleftrightarrow}\frac{rz^{-1}\sin\Omega_{0}}{1-2rz^{-1}\cos\Omega_{0}+r^{2}z^{-2}}=\frac{rz\sin\Omega_{0}}{z^{2}-2rz\cos\Omega_{0}+r^{2}}
\end{gathered}
\]
卷积、差分、累加,时域扩展,自己看上面
- 初值定理
与拉式变换有些许区别
初值定理不需要条件
取极限不需要*s
\[
x[0]=\lim_{z\to\infty}X(z)
\]
- 终值定理
取 1 ,因为要考虑单位圆上的极点(思考复变函数中的域的原点与无穷远处的留数)
从 Z 域内分析
终值定理只有当 X(z)的 全部极点都落在单位圆之内 => \(\lim_{n\to+\infty}x[n]=0\)
或 X(z)在 单位圆上仅在 **\(z=1\) 处有一阶极点** (此时 lim x[n]为一常数)才可应用
人家{等式左边}要存在你才能求啊
\[
\lim_{n\to+\infty}x[n]=\lim_{z\to1}(z-1)X(z)
\]
Z 逆变换
-
长除法【yue~】【但如果是幂级数可以试试】
-
部分分式展开法【GOOOOOD】
下面介绍第二种方法,就和把大象装进冰箱一样简单
- 等式左右 /z ,等式左边变成 X(z)/z
- 右侧拆项(和LT一模一样)【注意重根,求导时极点值可能会结果系数】
- 把z乘回去,利用模块直接转换回去
差分方程的 Z 域求解
基于时移特性,有
\[
x[n-m]u[n] \longleftrightarrow z^{-m}\bigg[X(z)+\sum_{k=-m}^{-1}x[k]z^{-k}\bigg]
\]
然后与 LT 一致【又是一样(─.─|||】,分为 零输入 和 零响应
例题


双边 Z 变换
ROC
同样的,只不过是将 S 域 向 左卷曲成一个圆
因果与非因果 【-n-1】 并添负号
\[
x[n]=a^nu[n] —— x[n]=-a^nu[-n-1]
\]
稳定与因果:
ROC 圆内 则为反因果,反之因果
稳定看极点位置,在单位圆内{用脑子想想就能理解,收敛嘛}
给点例题
只说双边的,需要分类讨论
若形似三角逆变换,但\(Z^{-2}\)次系数不为 1 考虑\({r}^n x(z)\)
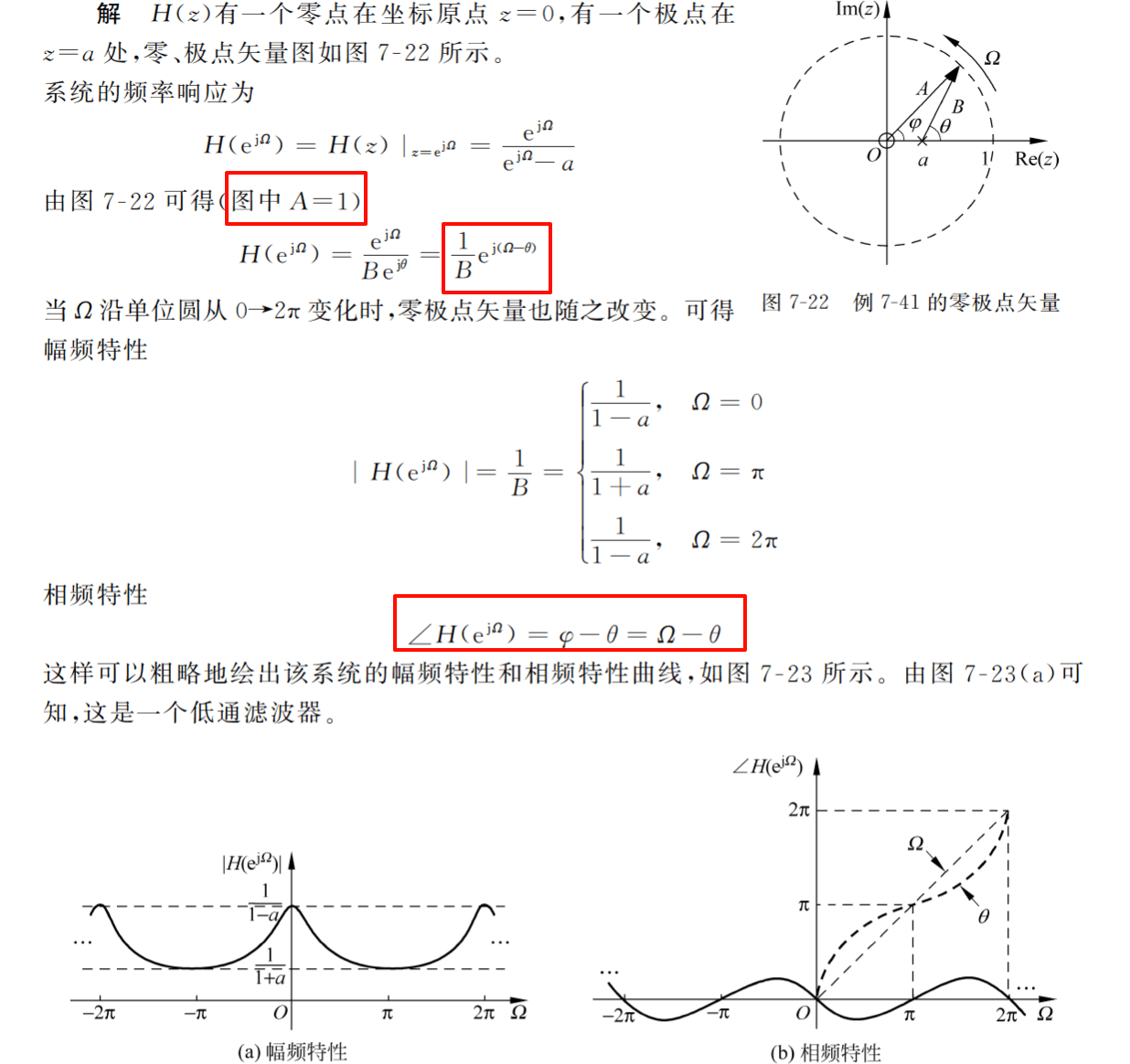
系统函数 H(z)
已知 h[0] ,可以直接用 初值定理 确定 系统函数 的 增益系数 K
与 拉氏变换相似,但区别于 从虚轴的 0 到无穷,Z 域为沿着单元转一圈
容易得到:\(H(z)\mid_{z=\mathrm{e}^{j\Omega}} = H(e^{j\Omega})\)
【则对因果稳定系统,可通过零极点图粗略分析频响】
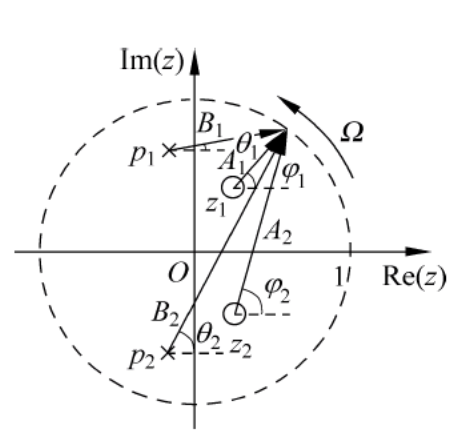
\[
\begin{aligned}&零点矢量:e^{j\Omega}-z_i=A_i\:\mathrm{e}^{\mathrm{j}\varphi_i}\\&极点矢量:e^{j\Omega}-p_i=B_i\:\mathrm{e}^{\mathrm{j}\theta_i}\end{aligned}
\]
得到了模和幅角,于是可有
\[
H(\mathrm{j}\omega)\:=\:|\:H(\mathrm{j}\omega)\:|\:\mathrm{e}^{\mathrm{j}\angle H(\mathrm{j}\omega)}
\]
其中
\[
\mid H(\text{j}\omega)\mid=\mid K\mid\frac{\prod\limits_{i=1}^MA_i}{\prod\limits_{i=1}^NB_i}
\]
\[
\angle H(\text{j}\omega)=\sum_{i=1}^M\varphi_i-\sum_{i=1}^N\theta_i
\]
s举个例子

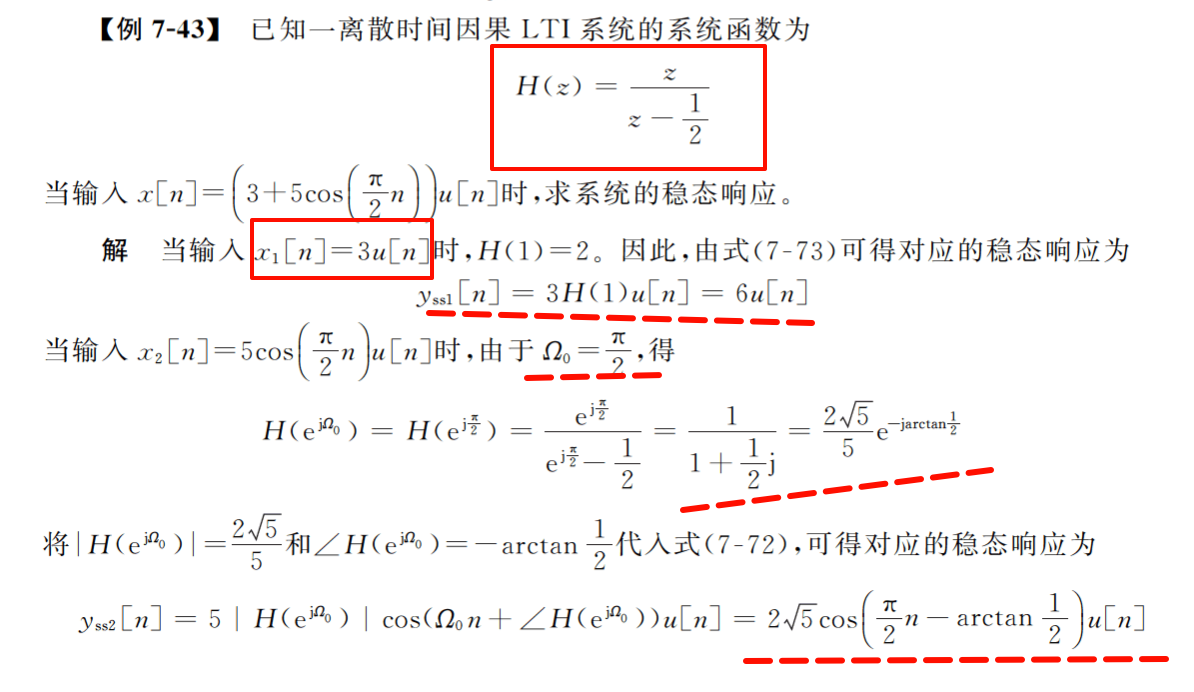
因果正弦信号的响应求解
就是求\(H(e^{j\Omega_0})\)
对系统函数有
\[
H(z)=\frac{N(z)}{D(s)}
\]
给一 cos[wn]u[n],有
\[
Y(z)=H(z)X(z)=\frac{N(z)}{D(z)}\cdot\frac{z(z-\cos\Omega_0)}{(z-\mathrm{e}^{\mathrm{j}\Omega_0})(z-\mathrm{e}^{-\mathrm{j}\Omega_0})}
\]
展开
\[
Y(s)=\frac{N_1(s)}{D(s)}+\frac{A}{s-e^{\mathrm{j}\Omega_0}}+\frac{A^*}{s-e^{-\mathrm{j}\Omega_0}}
\]
系数 A 为
\[
A=Y(s)(s-\mathrm{j}\omega_0)_{|s=\mathrm{j}\omega_0}=\frac{1}{2}H(e^{\mathrm{j}\Omega_0})
\]
所以,Y(z)为
\[
\frac{Y(z)}{z}=\frac{N_1(z)}{D(z)}+\frac{1}{2}\:\frac{|\:H(\:\mathrm{e}^{\mathrm{i}\Omega_0}\:)\:|\:\mathrm{e}^{\mathrm{i}\angle H(\:\mathrm{e}^{\mathrm{i}\Omega_0}\:)}}{z-\mathrm{e}^{\mathrm{i}\Omega_0}}+\frac{1}{2}\:\frac{|\:H(\:\mathrm{e}^{-\mathrm{j}\Omega_0}\:)\:|\:\mathrm{e}^{-\mathrm{j}\angle H(\:\mathrm{e}^{-\mathrm{j}\Omega_0}\:)}}{z-\mathrm{e}^{-\mathrm{j}\Omega_0}}
\]
作逆变换
\[
y[n]=y_1[n]+\mid H(\mathrm{e}^{\mathrm{j}\Omega_0})\mid\cos(\Omega_0n+\angle H(\mathrm{e}^{\mathrm{j}\Omega_0}))u[n]
\]
若系统稳定,则 D(s)的根都落在 s 平面的左半平面,因此,\(\operatorname*{lim}_{t\to+\infty}y_{1}\left(t\right)=0\),即暂态响应 = 0
稳态响应为
\[
y_{ss}[n]=\mid H(\mathrm{e}^{\mathrm{j}\Omega_0})\mid\cos(\Omega_0n+\angle H(\mathrm{e}^{\mathrm{j}\Omega_0}))u[n]
\]
观察发现生成额外的频率分量
单位阶跃响应的求解
就是求\(H(1)\)
同理有
\[
y[n]=y_1[n]+H(1)u[n]
\]
\[
y_{\mathrm{ss}}[n]=H(1)u[n]
\]
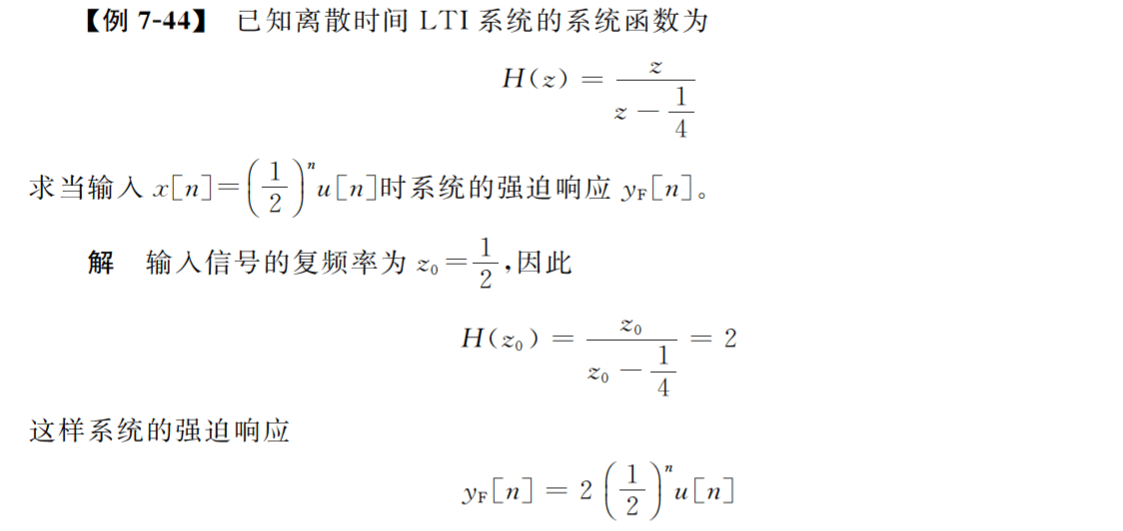
强迫响应的求解
稳态响应可以是强迫响应,反之不成立
也是一样,找极点代入即可
实在不行就 Y = H(z)·X(z)
但当为极点时,为 \(\delta[n-m]\)
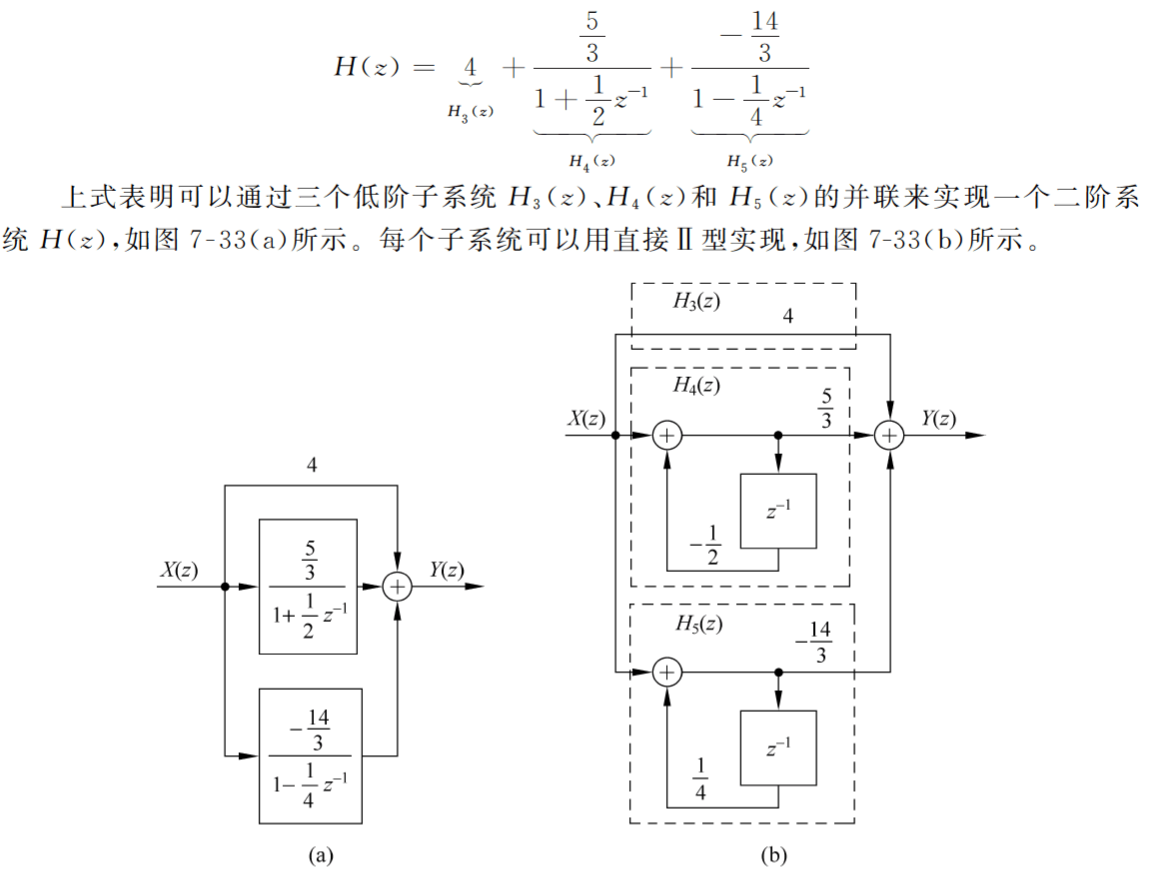
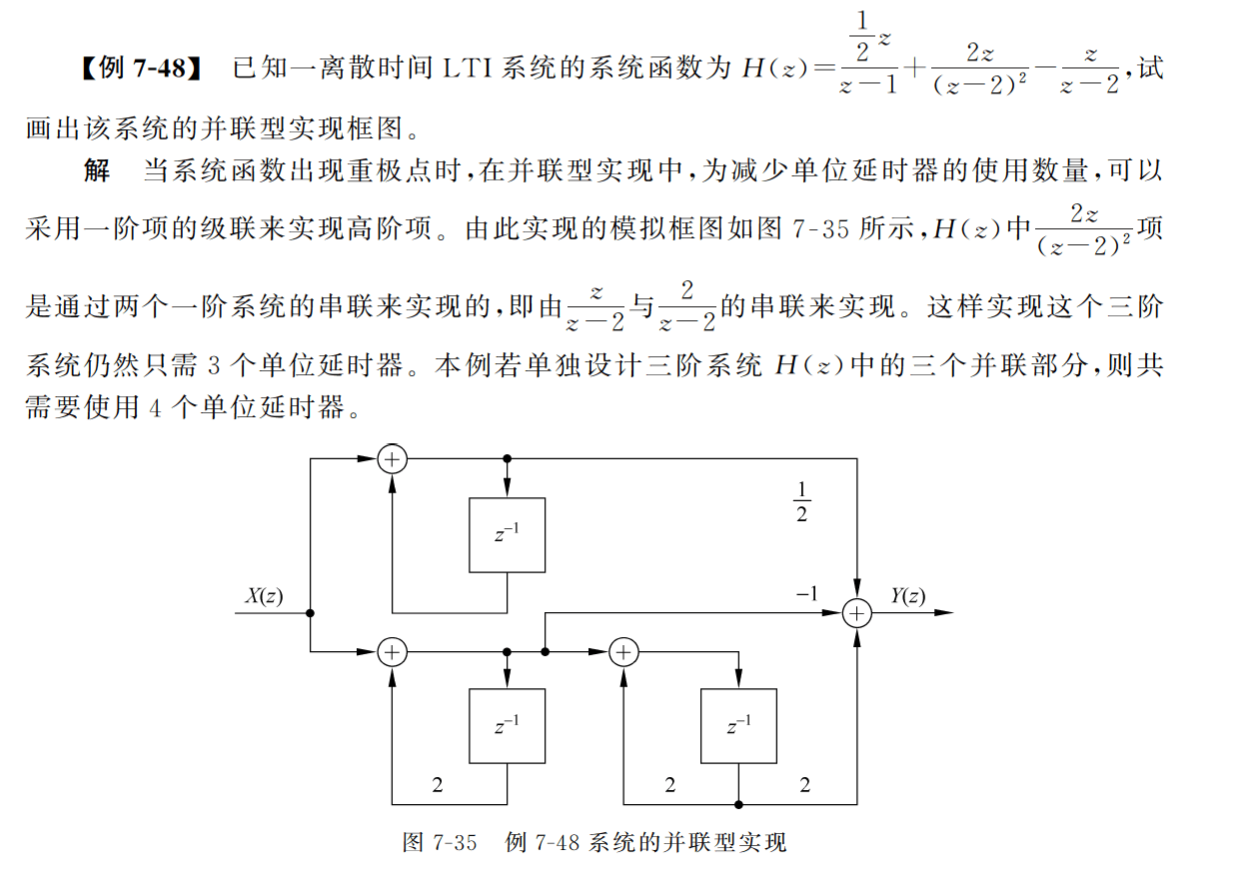
框图表示
计算切莫跳步,循规蹈矩而已
同样的,有串联、并联和反馈三种
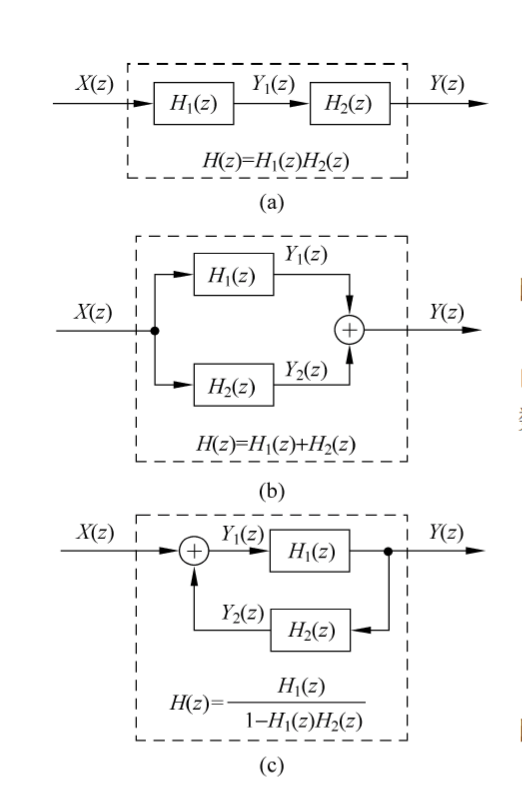

同样的,需要把 分母最高次 变成 1