基于卷积神经网络的FashionMNIST分类¶
约 5883 个字 • 582 行代码 预计阅读时间 40 分钟
写在前面¶
一直有再探ML的欲望,但一直没啥动力。正好以此次大作业为契机,基于项目督促自己学习
全文分为两个部分:CNN介绍与Fashion MNIST分类实战
前者除了CNN的一些基本概念说明,还尝试通过逐行代码分析解构基本的机器学习框架
后者则是将理论运用于实践中,但较为粗糙
WHAT IS CNN?¶
本节对卷积神经网络(Convolutional Neural Network,CNN),在算法与代码两个层面进行介绍。
CNN 介绍¶
包括 CNN 基本概念与工作流程。
卷积神经网络(CNN)是一种专门用于处理具有网格结构数据(如图像)的深度学习模型。
CNN 的核心思想是通过卷积操作(Convolution Operation)提取图像的局部特征,并通过多层网络结构逐步组合这些特征,最终实现分类、检测等任务。CNN 在计算机视觉领域取得了巨大成功,广泛应用于图像分类(Image Classification)、目标检测(Object Detection)、语义分割(Semantic Segmentation)等任务。
CNN的一些基本概念¶
CNN 通过卷积核(Filter/Kernel)在输入图像上滑动,每次只关注图像的一个局部区域(称为感受野),而不是整个图像。
这种局部连接的方式大大减少了参数量,同时保留了图像的局部特征。
比如,一个 3x3 的卷积核每次只处理输入图像的 3x3 区域。
卷积核在图像上滑动时,使用的是相同的权重参数。这种权值共享机制进一步减少了模型的参数量,并增强了模型对平移不变性(Translation Invariance)的捕捉能力。这使得无论特征出现在图像的哪个位置,卷积核都能检测到它。
CNN 通过多层卷积和池化操作,逐步提取从低级到高级的特征。低级特征(如边缘、纹理)在浅层提取,而高级特征(如物体形状、语义信息)在深层提取。
在卷积操作后,通常会使用非线性激活函数(如 ReLU)引入非线性,使模型能够学习更复杂的特征。常用激活函数有ReLU(Rectified Linear Unit)、LeakyReLU、ELU 等。
工作流程¶
根据FashionMNIST数据集特点,介绍本实验使用的CNN模型工作流程,结构图1见图1。

- 输入图像(Input Image)
- 输入图像的尺寸为
1@28x28,表示单通道(灰度)的 28x28 像素图像
- 第一层卷积(Convolution 1)
-
使用 32 个卷积核(Filters),每个卷积核的尺寸为
3x3,步长为 1,填充为 1 -
输入图像经过卷积操作后,生成 32 个特征图(Feature Maps),每个特征图的尺寸为
28x28 -
输出:
32@28x28
- 第一层最大池化(Max-Pool 1)
-
对卷积后的特征图进行最大池化操作(Max Pooling),池化窗口尺寸为
2x2,步长为 2 -
池化操作将特征图的尺寸减半
-
输出:
32@14x14
- 第二层卷积(Convolution 2)
-
使用 64 个卷积核,每个卷积核的尺寸为
3x3,步长为 1,填充为 1 -
输入为
32@14x14的特征图,经过卷积操作后,生成 64 个特征图,每个特征图的尺寸为14x14 -
输出:
64@14x14
- 第二层最大池化(Max-Pool 2)
-
对卷积后的特征图进行最大池化操作,池化窗口尺寸为
2x2,步长为 2 -
池化操作将特征图的尺寸减半
-
输出:
64@7x7
- 展平(Flatten) - 将池化后的特征图展平为一维向量
- 输入为
64@7x7,展平后的向量长度为64 * 7 * 7 = 3136 - 输出:
1x3136
- 第一层全连接(Fully Connected Layer 1)
- 将展平后的向量输入全连接层,全连接层的输出尺寸为
1x128
- 输出:
1x128
- 第二层全连接(Fully Connected Layer 2)
-
将第一层全连接层的输出输入第二层全连接层,输出尺寸为
1x10,表示 10 个类别的概率分布 -
输出:
1x10
还有什么?¶
CNN的历史副本是不可能通过一个作业全部洞悉的,故最终选择抛出两个具有代表性的模型
在后续的模型对比中,你还会再看见他们~
ResNet 是一种基于卷积神经网络(CNN)的深度学习模型,其核心创新是引入了 残差连接(Residual Connection) ,使得网络可以构建非常深的网络(如 ResNet-152),并通过残差连接有效地训练这些深层网络,同时避免梯度消失问题。ResNet 在图像分类、目标检测等任务中表现优异,是计算机视觉领域的经典模型之一。
ResNet 的基本概念包括 残差块(Residual Block) 和 层次化特征提取 。每个残差块包含两个卷积层和一个跳跃连接(Shortcut Connection),跳跃连接将输入直接加到卷积层的输出上,形成残差学习。通过多个残差块的堆叠,ResNet 能够逐步从图像中提取从低级到高级的特征。
ResNet 的工作流程可以分为以下几个步骤:首先,通过 初始卷积层 对输入图像进行卷积操作,提取初步特征;接着,通过 残差块堆叠 逐步提取更复杂的特征;然后,使用 全局平均池化 对特征图进行下采样,降低维度;最后,将池化后的特征输入 全连接层 ,完成分类任务。这种层次化的设计使得 ResNet 在图像分类、目标检测等任务中表现出色。
Transformer 引入图像处理领域,突破了传统卷积神经网络(CNN)的局部感受野限制。ViT 通过自注意力机制(Self-Attention)捕捉图像的全局信息,能够更好地理解图像中的长距离依赖关系。与传统的 CNN 不同,ViT 完全基于 Transformer,不使用卷积操作,这使得它在处理高分辨率图像时表现出色。
ViT 的基本概念包括 图像分块(Patch Embedding) 、 位置编码(Positional Encoding)和 Transformer 编码器 。首先,输入图像被分割成固定大小的块(如 16x16),每个块被展平为向量,并通过线性投影映射到嵌入空间。为了保留图像的空间信息,ViT 为每个图像块添加位置编码。随后,使用多层 Transformer 编码器对图像块进行特征提取,每层编码器包含自注意力机制和前馈神经网络。
ViT 的工作流程可以分为以下几个步骤:首先,将输入图像 分割成多个小块 ,并将这些块映射到嵌入空间;接着,为每个图像块 添加位置编码 ,以保留空间信息;然后,通过 多层 Transformer 编码器 提取特征;最后,使用 分类标记(CLS Token) 的输出进行最终分类。这种基于 Transformer 的设计使得 ViT 在处理复杂图像和全局信息时表现出色,成为计算机视觉领域的重要创新。
模型对比
两种模型,前者是现代CNN模型的守门员,另一者则为计算机视觉领域的革新者
在计算机视觉领域各有优势
ResNet 在传统任务中表现优异
而 ViT 在处理复杂图像和全局信息时表现出色
最简单的CNN分类模型:逐行解析¶
旨在厘清ML模型基本架构。
人生苦短,我选python
- 本节代码多为demo,可能跑不起来
- 带逐行的注释的完整代码见附录
按照惯例,先上图~
flowchart TD
A[开始] --> B[依赖库导入与基本配置]
subgraph B [依赖库导入与基本配置]
direction LR
B1[导入必要的库] --> B2[设置随机种子] --> B3[配置设备(CPU/GPU)]
end
B --> C[数据集导入与处理]
subgraph C [数据集导入与处理]
direction LR
C1[定义数据预处理] --> C2[加载数据集] --> C3[划分训练集和验证集] --> C4[创建 DataLoader]
end
C --> D[模型创建与实例化]
subgraph D [模型创建与实例化]
direction LR
D1[定义 CNN 模型类] --> D2[实例化模型] --> D3[将模型移动到设备] --> D4[定义损失函数和优化器]
end
D --> E[训练与评估]
subgraph E [训练与评估]
direction LR
E1[定义训练函数] --> E2[定义验证函数] --> E3[训练模型] --> E4[测试模型] --> E5[输出测试准确率]
end
E --> F[结束]
%% 样式优化 - 主模块
style A fill:#8ECFC9,color:white,stroke:#8ECFC1,stroke-width:1px,stroke-dasharray:3
style B fill:#82B0D2,color:white,stroke:#82B0D1,stroke-width:1px
style C fill:#FFBE7A,color:white,stroke:#FFBE71,stroke-width:1px
style D fill:#BEB8DC,color:white,stroke:#BEB8D1,stroke-width:1px
style E fill:#E7DAD2,color:white,stroke:#E7DAD1,stroke-width:1px
style F fill:#8ECFC9,color:white,stroke:#8ECFC1,stroke-width:1px,stroke-dasharray:3
%% 样式优化 - 子模块
style B1 fill:#BBDEFB,color:#000,stroke:#64B5F6,stroke-width:1px
style B2 fill:#BBDEFB,color:#000,stroke:#64B5F6,stroke-width:1px
style B3 fill:#BBDEFB,color:#000,stroke:#64B5F6,stroke-width:1px
style C1 fill:#FFE0B2,color:#000,stroke:#FFB74D,stroke-width:1px
style C2 fill:#FFE0B2,color:#000,stroke:#FFB74D,stroke-width:1px
style C3 fill:#FFE0B2,color:#000,stroke:#FFB74D,stroke-width:1px
style C4 fill:#FFE0B2,color:#000,stroke:#FFB74D,stroke-width:1px
style D1 fill:#E1BEE7,color:#000,stroke:#BA68C8,stroke-width:1px
style D2 fill:#E1BEE7,color:#000,stroke:#BA68C8,stroke-width:1px
style D3 fill:#E1BEE7,color:#000,stroke:#BA68C8,stroke-width:1px
style D4 fill:#E1BEE7,color:#000,stroke:#BA68C8,stroke-width:1px
style E1 fill:#F8BBD0,color:#000,stroke:#F06292,stroke-width:1px
style E2 fill:#F8BBD0,color:#000,stroke:#F06292,stroke-width:1px
style E3 fill:#F8BBD0,color:#000,stroke:#F06292,stroke-width:1px
style E4 fill:#F8BBD0,color:#000,stroke:#F06292,stroke-width:1px
style E5 fill:#F8BBD0,color:#000,stroke:#F06292,stroke-width:1px
linkStyle 0 stroke:#666,color;
linkStyle 1 stroke:#666,color;
linkStyle 2 stroke:#666,color;
linkStyle 3 stroke:#666,color;
linkStyle 4 stroke:#666,color;
linkStyle 5 stroke:#666,color;
linkStyle 6 stroke:#666,color;
linkStyle 7 stroke:#666,color;
linkStyle 8 stroke:#666,color;
linkStyle 9 stroke:#666,color;
linkStyle 10 stroke:#666,color;
linkStyle 11 stroke:#666,color;
linkStyle 12 stroke:#666,color;
linkStyle 13 stroke:#666,color;
linkStyle 14 stroke:#666,color;
linkStyle 15 stroke:#666,color;
linkStyle 16 stroke:#666,color;
地图有了,就可以愉快的解构代码一一映射啦2🫡
巧妇难为无米之炊,一个项目往往需要数个功能各异的库协同合作
导入必要的库
torch:PyTorch 的核心库,用于张量操作和深度学习模型torch.nn:PyTorch 的神经网络模块,包含层和损失函数torch.nn.functional:包含激活函数等操作torch.optim:优化算法模块,如 SGD 和 Adamtorchvision:用于处理图像数据集和图像变换DataLoader和random_split:用于加载和划分数据集einops:用于张量操作的高级库matplotlib.pyplot:用于绘制图表time:用于计算时间
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader, random_split
from einops import rearrange
import matplotlib.pyplot as plt
import time
设置随机种子
设置随机种子为 99,确保~代码复活~每次运行代码时结果可重复。
设备配置
这一步是必要的,A卡就老老实实用CPU吧
在介绍数据处理前,先简要说明一下大名鼎鼎的Fashion MNIST数据集。
Fashion MNIST 数据集是 10 个时尚类别的灰度图像集合,每个图像大小为 28x28 像素。它用作经典 MNIST 数据集的替代品。由于服装项目相似,因此它的分类问题比常规 MNIST 数字数据集更具挑战性。
![]()
数据集中每幅图像对应一个0~9的标签,代表十个类别:
| Label | Description |
|---|---|
| 0 | T-shirt/top |
| 1 | Trouser |
| 2 | Pullover |
| 3 | Dress |
| 4 | Coat |
| 5 | Sandal |
| 6 | Shirt |
| 7 | Sneaker |
| 8 | Bag |
| 9 | Ankle boot |
数据预处理
ToTensor():将图像转换为 PyTorch 张量Normalize((0.5,), (0.5,)):将像素值从 [0, 1] 归一化到 [-1, 1]
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,)) # 归一化到[-1, 1]
])
下载数据集
root='./data':数据集存储路径train=True:加载训练集|train=False:加载测试集download=True:如果数据集不存在,则自动下载transform=transform:应用定义的数据预处理
train_dataset = datasets.FashionMNIST(
root='./data',
train=True,
download=True,
transform=transform
)
test_dataset = datasets.FashionMNIST(
root='./data',
train=False,
download=True,
transform=transform
)
数据集划分
将训练集划分为训练集和验证集:
train_size:训练集大小(80%)val_size:验证集大小(20%)random_split:随机划分数据集
train_size = int(0.8 * len(train_dataset))
val_size = len(train_dataset) - train_size
train_dataset, val_dataset = random_split(train_dataset, [train_size, val_size])
创建DataLoader
batch_size=64:每次加载 64 张图片shuffle=True:训练集打乱顺序,验证集和测试集不打乱
# 创建DataLoader
train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=64, shuffle=False)
test_loader = DataLoader(test_dataset, batch_size=64, shuffle=False)
题外话——数据处理用到的库
torchvision是 PyTorch 生态系统中的一个库,它提供了一套用于计算机视觉的实用程序。它提供:
- 预训练模型(如 ResNet、VGG 和 AlexNet)
- 流行的数据集和用于预处理这些数据集的转换
- 用于创建自定义数据集和数据加载器的实用程序
我们主要用于torchvision访问 Fashion MNIST 数据集并对图像应用转换
torch.utils是 PyTorch 中的一个实用模块,它提供了多个子模块来协助完成各种任务。
其最常用的子模块之一是data,它有助于处理数据集并提供工具来高效地加载和预处理数据。
DataLoader torch.utils.data是一个包装数据集并提供小批量数据的类。它提供:
- 数据分批:为了更好地优化和更快地进行训练,我们经常对小批量数据进行训练,而不是对整个数据集进行训练
- 混洗:在每个时期开始时随机地重新排序训练数据,以减少模型方差
- 并行加载:使用多线程在后台准备批次,确保 GPU/CPU 保持繁忙
说人话,洗牌的🤪
以最典型的CNN为例,不涉及Dropout。工作流程在上一节已有所说明。
定义CNN模型类
conv1:第一层卷积,输入通道 1,输出通道 32,卷积核大小 3x3conv2:第二层卷积,输入通道 32,输出通道 64,卷积核大小 3x3fc1:全连接层,输入大小为 64*7*7,输出大小为 128fc2:全连接层,输入大小为 128,输出大小为 10(对应 10 个类别)
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, stride=1, padding=1)
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, stride=1, padding=1)
self.fc1 = nn.Linear(64 * 7 * 7, 128)
self.fc2 = nn.Linear(128, 10)
前向传播
有以下过程:
- 通过卷积层和 ReLU 激活函数提取特征
- 通过最大池化层下采样
- 将特征展平为一维向量
- 通过全连接层和 ReLU 激活函数进行分类
- 返回最终的输出
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.max_pool2d(x, 2)
x = F.relu(self.conv2(x))
x = F.max_pool2d(x, 2)
x = x.view(x.size(0), -1)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
模型实例化
即创建模型的一个实例并将其传输到适当的设备(CPU 或 GPU)
优化器与损失函数
- 优化器:Adam 优化器是常用的,可在训练期间调整学习率
- 损失函数:由于这是一个分类任务,我们使用交叉熵损失
题外话——优化器与损失函数的选择
优化器
优化器是根据损失函数的梯度来调整模型权重的算法。目标是最小化损失。有几种可用的优化器:
- SGD(随机梯度下降):这是梯度下降算法的基本形式。它使用损失函数对每个权重的梯度来更新模型的权重。
- 使用:
torch.optim.SGD(model.parameters(), lr=learning_rate) - 动量:SGD 的一种变体,它考虑到了前面的步骤,有助于加速收敛并避免局部最小值。
- 使用:
torch.optim.SGD(model.parameters(), lr=learning_rate, momentum=0.9) - Adam:结合了 SGD 的另外两个扩展,即 AdaGrad 和 RMSProp 的优点。它根据历史梯度信息调整每个权重的学习率。
- 使用:
torch.optim.Adam(model.parameters(), lr=learning_rate) - RMSProp:保持梯度平方的移动平均值,并将梯度除以该平均值的根。
- 使用:
torch.optim.RMSprop(model.parameters(), lr=learning_rate)
损失函数
- 交叉熵损失:用于多类分类。它量化了预测概率分布和实际分布之间的差异。
- 使用:
nn.CrossEntropyLoss() - 二元交叉熵损失:专门用于二元分类任务。
- 使用:
nn.BCELoss() - Hinge Loss(或 Margin Loss):用于“最大边缘”分类,主要用于 SVM。
- 使用:
nn.HingeEmbeddingLoss()
根据既定任务因地制宜
训练
训练神经网络涉及迭代更新其权重以最小化损失函数。此过程通常使用梯度下降优化算法来实现。
一般包含:
- Epochs:一个epoch代表所有训练样例的一次完整的前向和后向传递。周期数 (num_epochs) 是学习算法遍历整个训练数据集的次数。通常是自定义超参数
- 模型训练模式:神经网络可以以不同的模式运行——训练和评估
- 批处理:我们通常在一组称为批次的训练示例之后更新权重,而不是在每个训练示例(随机梯度下降)或整个数据集(批量梯度下降)之后更新权重
- 梯度归零:在 PyTorch 中,默认情况下梯度会累积。在计算当前批次中的新梯度之前,我们需要将先前的梯度设置为零
- 前向传递:输入数据(图像)通过网络逐层传递,直到得到输出。这个过程称为前向传播
- 计算损失:一旦我们有了网络的预测(输出),我们就使用损失函数将它们与真实标签进行比较。这可以衡量网络的预测与实际标签的匹配程度
- 反向传播:为了更新权重,我们需要知道损失函数相对于每个权重的梯度。向后传递计算这些梯度
- 更新权重:优化器根据向后传递中计算的梯度更新权重
对于数据集中的每个批次重复此循环(前向传递、损失计算、后向传递、权重更新)。
# 迭代次数
num_epochs = 1
# Start the training loop
for epoch in range(num_epochs):
# 将模型设置为训练模式
model.train()
size = len(trainloader.dataset)
# 迭代每批训练数据
for batch, (images, labels) in enumerate(trainloader):
# 将图像和标签移动到计算设备(CPU 或 GPU)
images, labels = images.to(device), labels.to(device)
# 清除上一次迭代的梯度
optimizer.zero_grad()
# 前向传递:将图像传递给模型以获得预测输出
outputs = model(images)
# 计算预测输出和真实标签之间的损失
loss = criterion(outputs, labels)
# 向后传递:计算损失 w.r.t 的梯度。模型参数
loss.backward()
# 更新模型参数
optimizer.step()
# Print the loss every 100 batches
if batch % 100 == 0:
loss, current = loss.item(), batch * len(images)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
评估(测试)
一旦我们的模型训练完成,评估其在未知数据上的表现就至关重要。
- 使用测试集评估准确度与泛用性
- 打印报告与绘制结果(如果你愿意的话)
import numpy as np
# 将模型设置为评估模式
model.eval()
# 用于存储所有预测和真实标签的列表
all_preds = []
all_labels = []
# 使用 torch.no_grad() 计算梯度
with torch.no_grad():
for images, labels in testloader:
images, labels = images.to(device), labels.to(device)
# 将图像传递给模型以获取预测
outputs = model(images)
# 获取具有最大概率的类作为预测类
_, predicted = torch.max(outputs, 1)
# 使用真实标签和预测计算混淆矩阵
all_preds.extend(predicted.cpu().numpy())
# 使用此批次中的真实标签扩展all_labels列表
all_labels.extend(labels.cpu().numpy())
# 打印报告
# 绘制结果
Putting CNN to Work¶
多说无益,在电脑风扇呼啸之前,你永远无法真切感受到ML的魅力!
MY ENVIRONMENT
- Anaconda:环境管理器,base八宝粥破坏者
- Python:最好是Python 3.x
- PyTorch 和 torchvision:PyTorch 是一个开源机器学习库,torchvision 提供计算机视觉的数据集和模型
- Jupyter Notebook:交互式环境,基于Vscode编译器
- NumPy:Python 中的数值运算库
- scikit-learn:Python 中的机器学习库。我们将使用它来获取性能指标
- Seaborn 和 Matplotlib:Python 中的可视化库
- CUDA(可选):如果您有兼容的 NVIDIA GPU,则可以安装 CUDA 以实现 PyTorch 的 GPU 加速
可能需要的:
- Anaconda + Pytorch 超详细安装教程
- conda常用命令:从入门到入土
- 对于
pip/pipx下载,若遇到下载速度过慢,不妨给定镜像源(通常是清华/阿里),即
- 非大项目,建议转战
Vscode,ALL IN ONE它不香嘛😜
RUNNING!¶
本节将从两个方面 拷打 测试CNN
- 控制模型,改变超参(学习率lr、优化器、激活函数)
# 定义不同的参数组合
learning_rates = [0.001, 0.01, 0.1]
optimizers = [optim.Adam, optim.SGD]
activation_functions = [F.relu, F.leaky_relu]
- 控制超参,改变模型
# 定义模型列表
models = {
'CNN': CNN().to(device),
'ResNet': ResNet().to(device),
'ViT': ViT().to(device)
}
训练与测试结果
| Learning Rate | Optimizer | Activation Function | Training Time (s) | Inference Time (ms) | Test Loss | Test Accuracy | Parameters | Model Size (Bytes) |
|---|---|---|---|---|---|---|---|---|
| 0.001 | Adam | relu | 241.59 | 0.103 | 0.3053 | 0.9134 | 421642 | 1686568 |
| 0.001 | Adam | leaky_relu | 240.98 | 0.106 | 0.2808 | 0.9161 | 421642 | 1686568 |
| 0.001 | SGD | relu | 244.02 | 0.105 | 0.5782 | 0.7879 | 421642 | 1686568 |
| 0.001 | SGD | leaky_relu | 245.92 | 0.107 | 0.5764 | 0.7905 | 421642 | 1686568 |
| 0.01 | Adam | relu | 253.14 | 0.114 | 0.3572 | 0.8729 | 421642 | 1686568 |
| 0.01 | Adam | leaky_relu | 267.85 | 0.115 | 0.3834 | 0.8640 | 421642 | 1686568 |
| 0.01 | SGD | relu | 277.47 | 0.122 | 0.3529 | 0.8718 | 421642 | 1686568 |
| 0.01 | SGD | leaky_relu | 273.44 | 0.119 | 0.3508 | 0.8704 | 421642 | 1686568 |
| 0.1 | Adam | relu | 278.61 | 0.123 | 2.3124 | 0.1000 | 421642 | 1686568 |
| 0.1 | Adam | leaky_relu | 258.18 | 0.105 | 2.3089 | 0.1000 | 421642 | 1686568 |
| 0.1 | SGD | relu | 249.44 | 0.117 | 0.2546 | 0.9131 | 421642 | 1686568 |
| 0.1 | SGD | leaky_relu | 252.32 | 0.110 | 0.2749 | 0.9087 | 421642 | 1686568 |
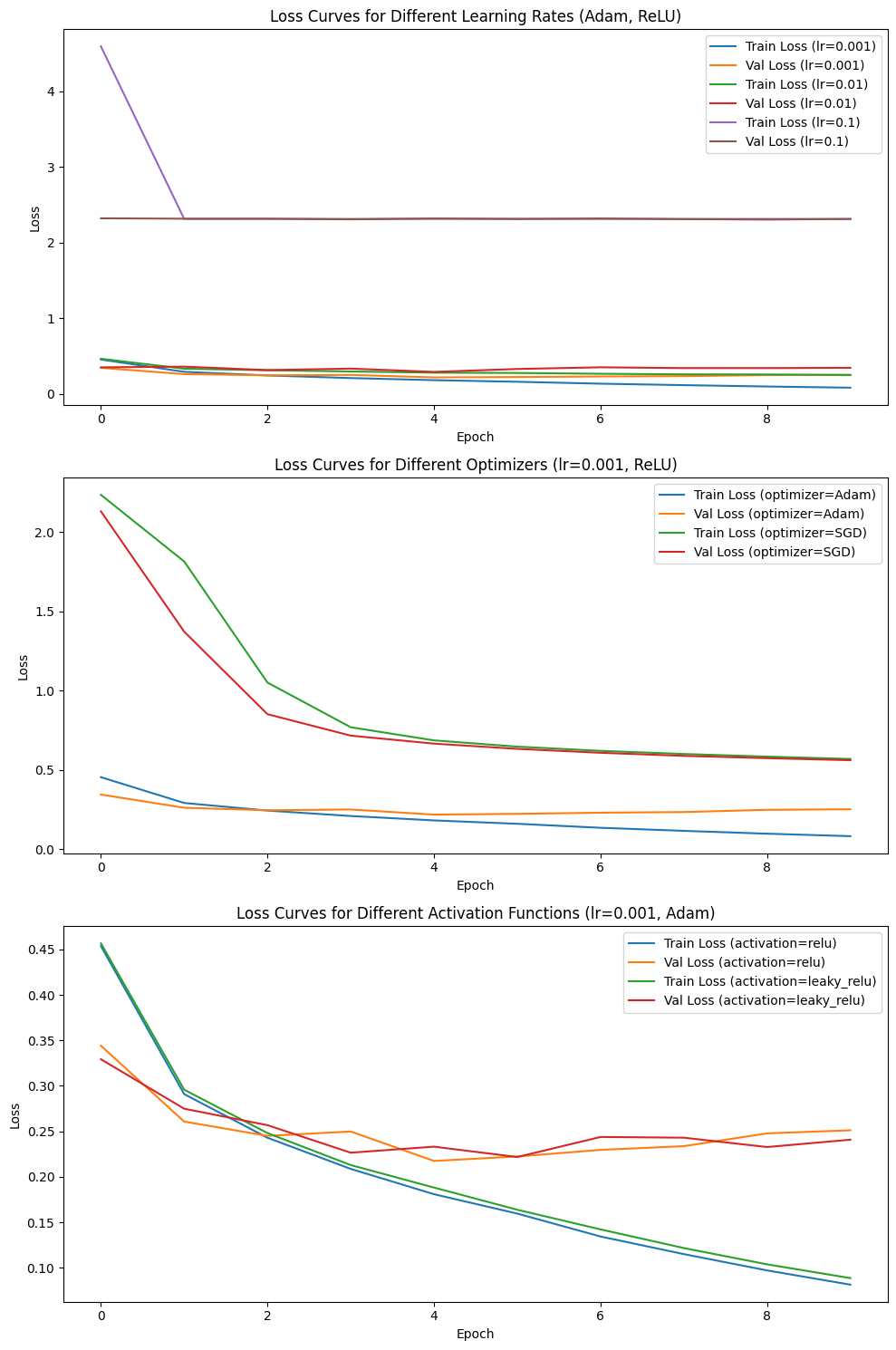
不同学习率对Loss的影响
低学习率(如0.001):
- 低学习率使模型每次更新的步幅较小,导致训练过程较稳定,但需要更多迭代次数才能收敛
- 优势:能避免梯度爆炸或不稳定收敛
- 缺点:训练时间长
高学习率(如0.1):
- 高学习率使每次权重更新幅度较大,可能导致Loss在最优值附近振荡甚至发散
- 实验中的验证集Loss较大波动,说明模型未能有效学习目标函数
最佳学习率(0.001):
- 稳定下降且最终Loss最低,证明其兼顾了收敛速度和准确性。
不同优化器对Loss的影响
Adam优化器:
- Adam结合了动量与自适应学习率的优点,能自动调整每个参数的学习率,特别在非凸优化问题中表现良好
- 实验中,Adam收敛速度快,Loss曲线陡峭下降,验证集Loss也较低
- 在高学习率时崩坏,不能使用
SGD优化器:
- SGD采用固定学习率,优化过程依赖于梯度的全局方向。
- 在实验中,SGD表现出收敛慢的特性,训练时间较长,但在高lr时表现出更稳定更优秀的特性。
不同激活函数对Loss的影响
ReLU激活函数:
- ReLU对正值保持线性,而对负值输出0,计算高效且收敛速度快
- 实验中,ReLU的训练和验证Loss曲线平滑下降,且验证Loss较低,表明模型学到了有效的特征
Leaky ReLU激活函数:
- Leaky ReLU在负值区域提供了微小的负斜率,避免了“神经元死亡”的问题
- 实验中,Leaky ReLU的验证Loss在初期低于ReLU,但中后期波动较大,可能因较复杂的负值梯度学习带来不稳定
测试Loss和准确率(Test Accuracy):
lr=0.001, Adam, ReLU的测试Accuracy最高(0.9134),表明其泛化能力最佳。- 高学习率(如0.1)或使用Adam时,测试Loss和准确率下降,说明模型可能过拟合或欠拟合。
训练时间与推理时间:
- Adam优化器需要更多计算量以动态调整学习率,因此训练时间略长。
- 推理时间与模型大小无关,因此不同超参数配置下几乎相同。
一些结论
- 学习率的平衡:0.001提供了最佳的稳定性与收敛效果
- 优化器的选择:Adam表现更快,但SGD在某些场景可实现竞争力
- 激活函数的取舍:ReLU更稳健,而Leaky ReLU有潜在优势但波动较大
- 泛化能力:测试集表现上,
lr=0.001, Adam, ReLU显然是最优选择
训练与测试结果
| Model | Parameters | Model Size (Bytes) | Training Time (s) | Avg. Inference Time per Sample (ms) | Test Loss | Test Accuracy |
|---|---|---|---|---|---|---|
| CNN | 421642 | 1686568 | 307.94 | 0.139 | 0.3065 | 0.9116 |
| ResNet | 11172810 | 44691240 | 6906.87 | 0.4027 | 0.3030 | 0.9189 |
| ViT | 139018 | 556072 | 399.43 | 0.138 | 2.3033 | 0.1000 |
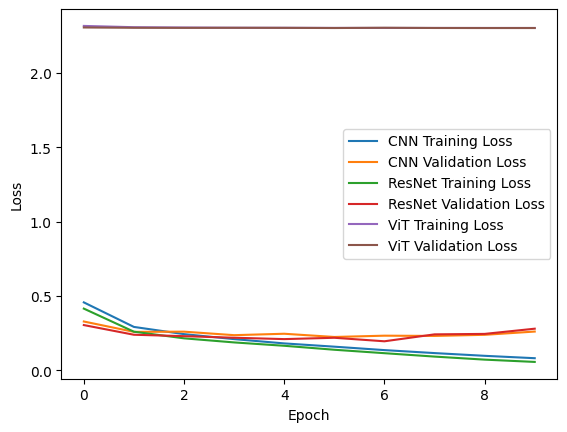
训练和验证损失分析
- CNN 和 ResNet 的训练和验证损失整体较低,且变化趋势较为稳定。随着 epoch 增加,损失逐渐减小,但 CNN 训练后期可能出现轻微的过拟合现象(如验证损失略有增加)。
- ViT 的训练损失与验证损失非常高,说明模型可能欠拟合。
参数量与模型大小
- CNN 参数量适中(421,642),表明 CNN 是一个轻量级模型,适合资源受限的设备
- ResNet 的参数量显著增加(11,172,810),模型大小最大(~44.69 MB),表明它更复杂,更适合处理更复杂的数据或任务
- ViT 的参数量最少(139,018),模型大小也最小(~0.56 MB),理论上应该具备更快的推理速度,但其性能可能受到数据集规模和模型架构的影响
训练时间与推理时间
- CNN 的训练时间最短(307.94 秒),推理时间也最低,表明它效率最高,非常适合快速迭代
- ResNet 的训练时间超级长(6,906.87 秒),推理时间也相对较高,但它在分类任务中的表现优异
- ViT 的训练时间则略长于 CNN(399.43 秒)
测试损失与准确率
- CNN 和 ResNet 在测试集上的损失较低(分别为 0.3065 和 0.3030),且测试准确率较高(分别为 91.16% 和 91.89%)
- ResNet 的表现略优于 CNN
- ViT 的测试损失高达 2.3033,测试准确率仅为 10%,这纯纯在猜啊🤣。这表明 ViT 未能很好地学习到 FashionMNIST 的特征
结论
- CNN 是一个轻量级、高效的模型,在准确率和推理时间之间取得了良好的平衡。
- ResNet 是一个强大的模型,在性能上稍胜一筹,但需要更多的训练时间和资源。
- ViT 的表现极差,可能是因为 ViT 对训练数据的规模和多样性更为敏感,而 FashionMNIST 数据集较小,导致模型未能充分发挥其优势。
对于 FashionMNIST 数据集
-
ResNet 是综合表现最好的模型,其次是 CNN
-
ViT 在该任务中不适用,但在更复杂的任务中可能更有潜力。
补充
若服务器是A卡,即不能GPU加速,则很明显 经典CNN 才是 Champion 。相差不多的准确率,等 ResNet 跑完人都麻了。
但实际上基本都是用的GPU,基本上是10倍效率往上,所以相对来说 ResNet 的时间是可以接受的,故其为最优解
当然, VIT 本就是拿来划水了,这点样本量都不够剔牙捏~
最后¶
这是笔者第一次从查阅资料到实验结果分析,系统地走了一遍。
期末周匆匆忙忙赶出来的,也是漏洞百出。
但总算是结束啦~
附录¶
# 导入必要的库
import torch # PyTorch 核心库,用于张量操作和深度学习模型
import torch.nn as nn # PyTorch 的神经网络模块,包含层和损失函数
import torch.nn.functional as F # 包含激活函数等操作
import torch.optim as optim # 优化算法模块,如 SGD 和 Adam
from torchvision import datasets, transforms # 用于处理图像数据集和图像变换
from torch.utils.data import DataLoader, random_split # 用于加载和划分数据集
from einops import rearrange # 用于张量操作的高级库
import matplotlib.pyplot as plt # 用于绘制图表
import time # 用于计算时间
# 固定随机种子,确保每次运行代码时结果可重复
torch.manual_seed(99)
# 获取设备(CPU 或 GPU),优先使用 GPU
device = "cuda" if torch.cuda.is_available() else "cpu"
print("Using {} device".format(device)) # 打印当前使用的设备
# 数据预处理
transform = transforms.Compose([
transforms.ToTensor(), # 将图像转换为 PyTorch 张量
transforms.Normalize((0.5,), (0.5,)) # 将像素值从 [0, 1] 归一化到 [-1, 1]
])
# 加载 Fashion MNIST 数据集
train_dataset = datasets.FashionMNIST(
root='./data', # 数据集存储路径
train=True, # 加载训练集
download=True, # 如果数据集不存在,则自动下载
transform=transform # 应用定义的数据预处理
)
test_dataset = datasets.FashionMNIST(
root='./data', # 数据集存储路径
train=False, # 加载测试集
download=True, # 如果数据集不存在,则自动下载
transform=transform # 应用定义的数据预处理
)
# 划分训练集和验证集
train_size = int(0.8 * len(train_dataset)) # 训练集大小(80%)
val_size = len(train_dataset) - train_size # 验证集大小(20%)
train_dataset, val_dataset = random_split(train_dataset, [train_size, val_size]) # 随机划分数据集
# 创建 DataLoader
train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True) # 训练集 DataLoader,打乱顺序
val_loader = DataLoader(val_dataset, batch_size=64, shuffle=False) # 验证集 DataLoader,不打乱顺序
test_loader = DataLoader(test_dataset, batch_size=64, shuffle=False) # 测试集 DataLoader,不打乱顺序
# 标准 CNN 模型
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
# 第一层卷积,输入通道 1,输出通道 32
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, stride=1, padding=1)
# 第二层卷积,输入通道 32,输出通道 64
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, stride=1, padding=1)
# 全连接层,输入大小为 64*7*7,输出大小为 128
self.fc1 = nn.Linear(64 * 7 * 7, 128)
# 全连接层,输入大小为 128,输出大小为 10(对应 10 个类别)
self.fc2 = nn.Linear(128, 10)
def forward(self, x):
x = F.relu(self.conv1(x)) # 通过第一层卷积和 ReLU 激活函数
x = F.max_pool2d(x, 2) # 通过最大池化层下采样
x = F.relu(self.conv2(x)) # 通过第二层卷积和 ReLU 激活函数
x = F.max_pool2d(x, 2) # 通过最大池化层下采样
x = x.view(x.size(0), -1) # 将特征展平为一维向量
x = F.relu(self.fc1(x)) # 通过全连接层和 ReLU 激活函数
x = self.fc2(x) # 通过全连接层进行分类
return x # 返回最终的输出
# ResNet 模型
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False) # 第一层卷积
self.bn1 = nn.BatchNorm2d(out_channels) # 批归一化层
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False) # 第二层卷积
self.bn2 = nn.BatchNorm2d(out_channels) # 批归一化层
self.shortcut = nn.Sequential() # 快捷连接
if stride != 1 or in_channels != out_channels: # 如果步长不为 1 或输入输出通道数不同
self.shortcut = nn.Sequential(
# 1x1 卷积调整维度
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels) # 批归一化层
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x))) # 通过第一层卷积、批归一化和 ReLU 激活函数
out = self.bn2(self.conv2(out)) # 通过第二层卷积和批归一化
out += self.shortcut(x) # 将快捷连接的结果与卷积结果相加
out = F.relu(out) # 通过 ReLU 激活函数
return out # 返回最终的输出
class ResNet(nn.Module):
def __init__(self, num_classes=10):
super(ResNet, self).__init__()
self.in_channels = 64 # 初始输入通道数
self.conv1 = nn.Conv2d(1, 64, kernel_size=3, stride=1, padding=1, bias=False) # 第一层卷积
self.bn1 = nn.BatchNorm2d(64) # 批归一化层
self.layer1 = self._make_layer(64, 2, stride=1) # 第一层残差块
self.layer2 = self._make_layer(128, 2, stride=2) # 第二层残差块
self.layer3 = self._make_layer(256, 2, stride=2) # 第三层残差块
self.layer4 = self._make_layer(512, 2, stride=2) # 第四层残差块
self.linear = nn.Linear(512, num_classes) # 全连接层,输出大小为 num_classes(10 个类别)
def _make_layer(self, out_channels, num_blocks, stride):
strides = [stride] + [1] * (num_blocks - 1) # 每个残差块的步长
layers = [] # 存储残差块的列表
for stride in strides:
layers.append(ResidualBlock(self.in_channels, out_channels, stride)) # 添加残差块
self.in_channels = out_channels # 更新输入通道数
return nn.Sequential(*layers) # 返回一个包含多个残差块的序列
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x))) # 通过第一层卷积、批归一化和 ReLU 激活函数
out = self.layer1(out) # 通过第一层残差块
out = self.layer2(out) # 通过第二层残差块
out = self.layer3(out) # 通过第三层残差块
out = self.layer4(out) # 通过第四层残差块
out = F.avg_pool2d(out, 4) # 通过平均池化层下采样
out = out.view(out.size(0), -1) # 将特征展平为一维向量
out = self.linear(out) # 通过全连接层进行分类
return out # 返回最终的输出
# Vision Transformer (ViT) 模型
class PatchEmbedding(nn.Module):
def __init__(self, img_size=28, patch_size=7, in_channels=1, embed_dim=64):
super(PatchEmbedding, self).__init__()
self.img_size = img_size # 输入图像大小
self.patch_size = patch_size # 每个 patch 的大小
self.num_patches = (img_size // patch_size) ** 2 # patch 的数量
# 卷积层,将图像分割为 patch 并投影到嵌入空间
self.proj = nn.Conv2d(in_channels, embed_dim, kernel_size=patch_size, stride=patch_size)
def forward(self, x):
x = self.proj(x) # 通过卷积层将图像分割为 patch
x = rearrange(x, 'b c h w -> b (h w) c') # 使用 rearrange 将 patch 重新排列为序列
return x # 返回最终的输出
class TransformerEncoder(nn.Module):
def __init__(self, embed_dim=64, num_heads=4, ff_dim=128, dropout=0.1):
super(TransformerEncoder, self).__init__()
self.attention = nn.MultiheadAttention(embed_dim, num_heads, dropout=dropout) # 多头注意力机制
self.norm1 = nn.LayerNorm(embed_dim) # 层归一化
self.norm2 = nn.LayerNorm(embed_dim) # 层归一化
self.ffn = nn.Sequential(
nn.Linear(embed_dim, ff_dim), # 前馈神经网络的第一层
nn.GELU(), # GELU 激活函数
nn.Linear(ff_dim, embed_dim) # 前馈神经网络的第二层
)
self.dropout = nn.Dropout(dropout) # 随机丢弃部分神经元,防止过拟合
def forward(self, x):
attn_output, _ = self.attention(x, x, x) # 通过多头注意力机制提取特征
x = x + self.dropout(attn_output) # 通过残差连接和 dropout
x = self.norm1(x) # 通过层归一化
ffn_output = self.ffn(x) # 通过前馈神经网络
x = x + self.dropout(ffn_output) # 通过残差连接和 dropout
x = self.norm2(x) # 通过层归一化
return x # 返回最终的输出
class ViT(nn.Module):
def __init__(self, img_size=28, patch_size=7, in_channels=1, embed_dim=64, num_heads=4, ff_dim=128, num_layers=4, num_classes=10, dropout=0.1):
super(ViT, self).__init__()
# Patch Embedding 层
self.patch_embedding = PatchEmbedding(img_size, patch_size, in_channels, embed_dim)
self.positional_embedding = nn.Parameter(torch.zeros(1, self.patch_embedding.num_patches + 1, embed_dim)) # 位置编码
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) # 分类 token
self.transformer_encoder = nn.ModuleList([
# 多个 Transformer 编码器层
TransformerEncoder(embed_dim, num_heads, ff_dim, dropout) for _ in range(num_layers)
])
self.norm = nn.LayerNorm(embed_dim) # 层归一化
self.fc = nn.Linear(embed_dim, num_classes) # 全连接层,输出大小为 num_classes(10 个类别)
def forward(self, x):
x = self.patch_embedding(x) # 将图像分割为 patch 并投影到嵌入空间
cls_token = self.cls_token.expand(x.shape[0], -1, -1) # 扩展分类 token
x = torch.cat((cls_token, x), dim=1) # 将分类 token 和 patch 序列拼接
x = x + self.positional_embedding # 添加位置编码
for layer in self.transformer_encoder: # 通过多个 Transformer 编码器层
x = layer(x)
x = self.norm(x) # 通过层归一化
cls_output = x[:, 0] # 提取分类 token 的输出
out = self.fc(cls_output) # 通过全连接层进行分类
return out # 返回最终的输出
# 训练函数
def train(model, train_loader, val_loader, criterion, optimizer, epochs=10):
train_losses, val_losses = [], [] # 存储训练和验证损失
for epoch in range(epochs):
model.train() # 将模型设置为训练模式
running_loss = 0.0 # 累计每个 epoch 的损失
for inputs, labels in train_loader:
inputs, labels = inputs.to(device), labels.to(device) # 将数据移动到设备(GPU 或 CPU)
optimizer.zero_grad() # 清空梯度
outputs = model(inputs) # 前向传播,计算输出
loss = criterion(outputs, labels) # 计算损失
loss.backward() # 反向传播,计算梯度
optimizer.step() # 更新模型参数
running_loss += loss.item() # 累计损失
train_losses.append(running_loss / len(train_loader)) # 记录每个 epoch 的训练损失
model.eval() # 将模型设置为评估模式
val_loss = 0.0 # 累计验证集的损失
with torch.no_grad(): # 不计算梯度,节省内存
for inputs, labels in val_loader:
inputs, labels = inputs.to(device), labels.to(device) # 将数据移动到设备(GPU 或 CPU)
outputs = model(inputs) # 前向传播,计算输出
loss = criterion(outputs, labels) # 计算损失
val_loss += loss.item() # 累计损失
val_losses.append(val_loss / len(val_loader)) # 记录每个 epoch 的验证损失
print(f"Epoch {epoch+1}/{epochs}, Train Loss: {train_losses[-1]:.4f}, Val Loss: {val_losses[-1]:.4f}") # 打印训练和验证损失
return train_losses, val_losses # 返回训练和验证损失列表
# 计算参数量
def count_parameters(model):
return sum(p.numel() for p in model.parameters()) # 计算模型的参数量
# 计算模型大小
def get_model_size(model):
return sum(p.numel() * p.element_size() for p in model.parameters()) # 计算模型的大小(以字节为单位)
# 计算平均推理时间 per sample
def measure_inference_time(model, test_loader):
model.eval() # 将模型设置为评估模式
total_time = 0.0 # 累计推理时间
num_samples = 0 # 累计样本数量
with torch.no_grad(): # 不计算梯度,节省内存
for inputs, labels in test_loader:
inputs, labels = inputs.to(device), labels.to(device) # 将数据移动到设备(GPU 或 CPU)
start_time = time.time() # 记录开始时间
outputs = model(inputs) # 前向传播,计算输出
end_time = time.time() # 记录结束时间
total_time += end_time - start_time # 累计推理时间
num_samples += inputs.size(0) # 累计样本数量
avg_time_per_sample = total_time / num_samples # 计算每个样本的平均推理时间
return avg_time_per_sample # 返回平均推理时间
# 评估测试集性能
def evaluate_on_test_set(model, test_loader, criterion):
model.eval() # 将模型设置为评估模式
test_loss = 0.0 # 累计测试集的损失
correct = 0 # 累计正确预测的数量
total = 0 # 累计样本数量
with torch.no_grad(): # 不计算梯度,节省内存
for inputs, labels in test_loader:
inputs, labels = inputs.to(device), labels.to(device) # 将数据移动到设备(GPU 或 CPU)
outputs = model(inputs) # 前向传播,计算输出
loss = criterion(outputs, labels) # 计算损失
test_loss += loss.item() # 累计损失
_, predicted = outputs.max(1) # 获取预测结果
total += labels.size(0) # 累计样本数量
correct += predicted.eq(labels).sum().item() # 累计正确预测的数量
test_loss /= len(test_loader) # 计算平均测试损失
test_accuracy = correct / total # 计算测试准确率
return test_loss, test_accuracy # 返回测试损失和准确率
# 定义不同的参数组合
learning_rates = [0.001, 0.01, 0.1] # 学习率列表
optimizers = [optim.Adam, optim.SGD] # 优化器列表
activation_functions = [F.relu, F.leaky_relu] # 激活函数列表
# 训练和评估不同参数组合
results = {} # 存储不同参数组合的结果
for lr in learning_rates:
for opt in optimizers:
for activation in activation_functions:
model = CNN().to(device) # 初始化模型
optimizer = opt(model.parameters(), lr=lr) # 初始化优化器
# 打印当前参数组合
print(f"Training with lr={lr}, optimizer={opt.__name__}, activation={activation.__name__}")
start_time = time.time() # 记录开始时间
train_losses, val_losses = train(model, train_loader, val_loader, nn.CrossEntropyLoss(), optimizer, epochs=10) # 训练模型
training_time = time.time() - start_time # 计算训练时间
# 评估测试集性能
test_loss, test_accuracy = evaluate_on_test_set(model, test_loader, nn.CrossEntropyLoss())
avg_inference_time = measure_inference_time(model, test_loader) # 计算平均推理时间
results[(lr, opt.__name__, activation.__name__)] = { # 存储结果
'train_losses': train_losses,
'val_losses': val_losses,
'training_time': training_time,
'test_loss': test_loss,
'test_accuracy': test_accuracy,
'parameters': count_parameters(model),
'model_size': get_model_size(model),
'avg_inference_time': avg_inference_time
}
# 绘制所有 Loss 曲线
def plot_all_loss_curves(results):
fig, axes = plt.subplots(3, 1, figsize=(10, 15)) # 创建一个大图,包含 3 行 1 列的子图
# 绘制不同学习率的 Loss 曲线
for lr in learning_rates:
key = (lr, 'Adam', 'relu')
if key in results:
train_losses = results[key]['train_losses']
val_losses = results[key]['val_losses']
axes[0].plot(train_losses, label=f'Train Loss (lr={lr})') # 绘制训练损失曲线
axes[0].plot(val_losses, label=f'Val Loss (lr={lr})') # 绘制验证损失曲线
axes[0].set_title('Loss Curves for Different Learning Rates (Adam, ReLU)') # 设置标题
axes[0].set_xlabel('Epoch') # 设置 x 轴标签
axes[0].set_ylabel('Loss') # 设置 y 轴标签
axes[0].legend() # 显示图例
# 绘制不同优化器的 Loss 曲线
for opt in optimizers:
key = (0.001, opt.__name__, 'relu')
if key in results:
train_losses = results[key]['train_losses']
val_losses = results[key]['val_losses']
axes[1].plot(train_losses, label=f'Train Loss (optimizer={opt.__name__})') # 绘制训练损失曲线
axes[1].plot(val_losses, label=f'Val Loss (optimizer={opt.__name__})') # 绘制验证损失曲线
axes[1].set_title('Loss Curves for Different Optimizers (lr=0.001, ReLU)') # 设置标题
axes[1].set_xlabel('Epoch') # 设置 x 轴标签
axes[1].set_ylabel('Loss') # 设置 y 轴标签
axes[1].legend() # 显示图例
# 绘制不同激活函数的 Loss 曲线
for activation in activation_functions:
key = (0.001, 'Adam', activation.__name__)
if key in results:
train_losses = results[key]['train_losses']
val_losses = results[key]['val_losses']
# 绘制训练损失曲线
axes[2].plot(train_losses, label=f'Train Loss (activation={activation.__name__})')
# 绘制验证损失曲线
axes[2].plot(val_losses, label=f'Val Loss (activation={activation.__name__})')
axes[2].set_title('Loss Curves for Different Activation Functions (lr=0.001, Adam)') # 设置标题
axes[2].set_xlabel('Epoch') # 设置 x 轴标签
axes[2].set_ylabel('Loss') # 设置 y 轴标签
axes[2].legend() # 显示图例
plt.tight_layout() # 调整布局,避免重叠
plt.show() # 显示绘制的图表
# 调用函数绘制所有 Loss 曲线
plot_all_loss_curves(results)
# 计算复杂度分析
for params, result in results.items():
print(f"Params: {params}") # 打印当前参数组合
print(f" Training Time: {result['training_time']:.2f} seconds") # 打印训练时间
print(f" Parameters: {result['parameters']}") # 打印参数量
print(f" Model Size: {result['model_size']} bytes") # 打印模型大小
# 打印平均推理时间
print(f" Average Inference Time per Sample: {result['avg_inference_time']:.6f} seconds")
# 打印测试损失和准确率
print(f" Test Loss: {result['test_loss']:.4f}, Test Accuracy: {result['test_accuracy']:.4f}")
print()
# 定义模型列表
models = {
'CNN': CNN().to(device), # CNN 模型
'ResNet': ResNet().to(device), # ResNet 模型
'ViT': ViT().to(device) # ViT 模型
}
# 训练和评估每个模型
model_results = {} # 存储每个模型的结果
for name, model in models.items():
optimizer = optim.Adam(model.parameters(), lr=0.001) # 初始化优化器
print(f"Training {name} model") # 打印当前模型名称
start_time = time.time() # 记录开始时间
train_losses, val_losses = train(model, train_loader, val_loader, nn.CrossEntropyLoss(), optimizer, epochs=10) # 训练模型
training_time = time.time() - start_time # 计算训练时间
test_loss, test_accuracy = evaluate_on_test_set(model, test_loader, nn.CrossEntropyLoss()) # 评估测试集性能
avg_inference_time = measure_inference_time(model, test_loader) # 计算平均推理时间
model_results[name] = { # 存储结果
'train_losses': train_losses,
'val_losses': val_losses,
'training_time': training_time,
'test_loss': test_loss,
'test_accuracy': test_accuracy,
'parameters': count_parameters(model),
'model_size': get_model_size(model),
'avg_inference_time': avg_inference_time
}
# 绘制对比图
for name, result in model_results.items():
plt.plot(result['train_losses'], label=f'{name} Training Loss') # 绘制训练损失曲线
plt.plot(result['val_losses'], label=f'{name} Validation Loss') # 绘制验证损失曲线
plt.xlabel('Epoch') # 设置 x 轴标签
plt.ylabel('Loss') # 设置 y 轴标签
plt.legend() # 显示图例
plt.show() # 显示绘制的图表
# 计算复杂度分析
for name, result in model_results.items():
print(f"{name} - Parameters: {result['parameters']}, Model Size: {result['model_size']} bytes, Training Time: {result['training_time']:.2f} seconds, Average Inference Time per Sample: {result['avg_inference_time']:.6f} seconds, Test Loss: {result['test_loss']:.4f}, Test Accuracy: {result['test_accuracy']:.4f}") # 打印复杂度分析结果